GECE 교육사업
| [AI 프로젝트 코딩기술서] Unity ML-Agent를 사용한 예인선 자율주행 강화학습 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 조회 수 : 1881 | |||||||||||
|
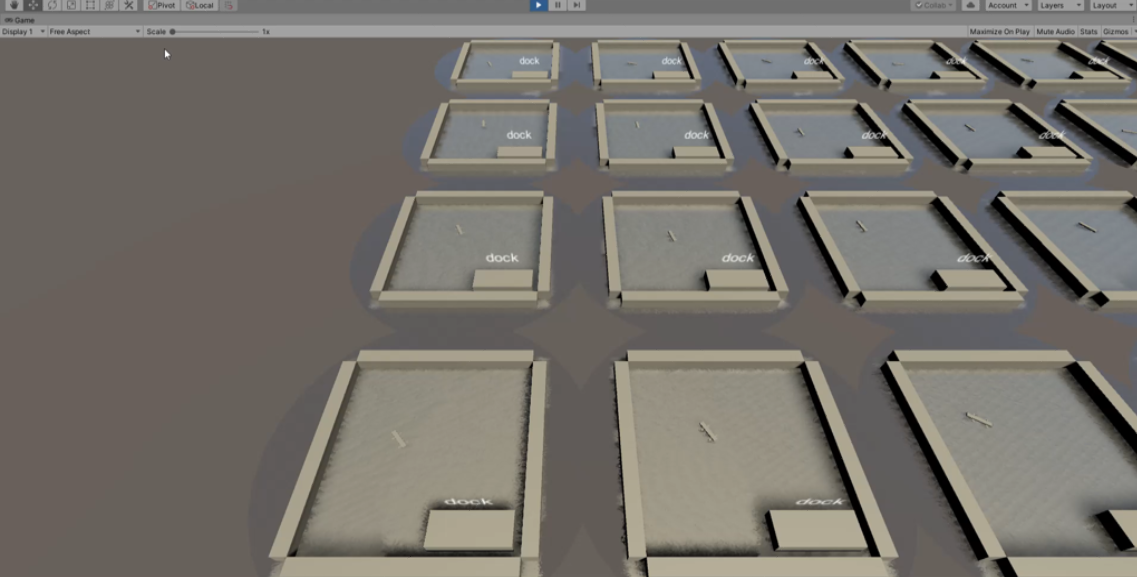
콘텐츠 소개(About Contents)본 프로젝트에서는 선박을 4대의 예인선을 이용해 부두에 접안시키는 자율주행을 Unity ml- agents를 사용하여 강화학습으로 구현하려고 한다. 접안하려는 선박은 추진장치를 사용하지 않으며 4대의 예인선에 의해 움직인다.
기획자(Planner)
|
|||||||||||